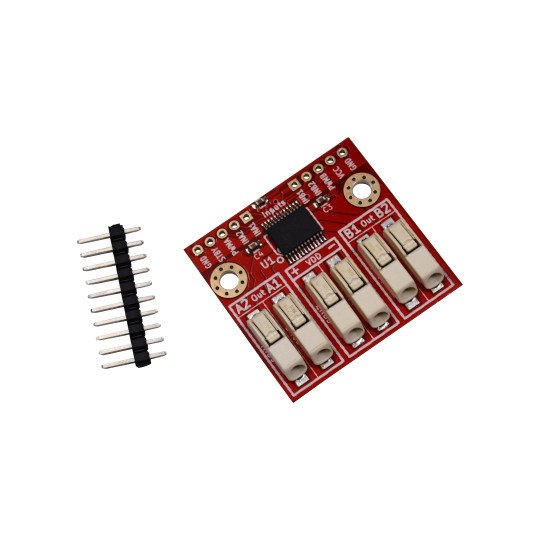

Produktbeskrivning
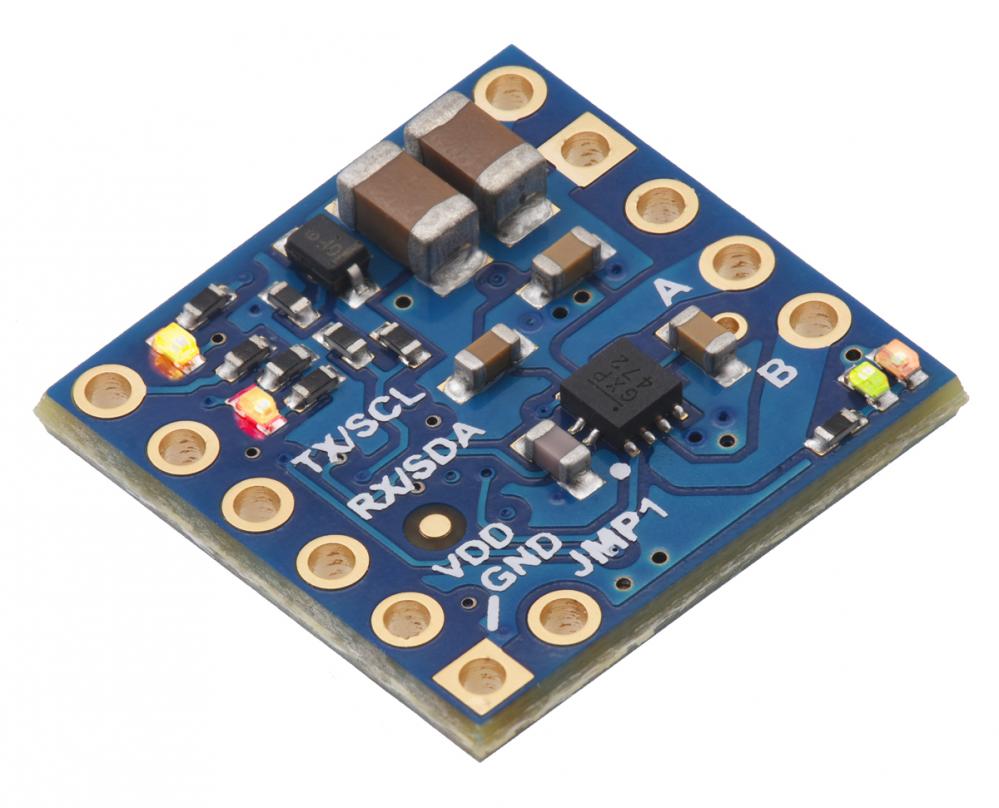
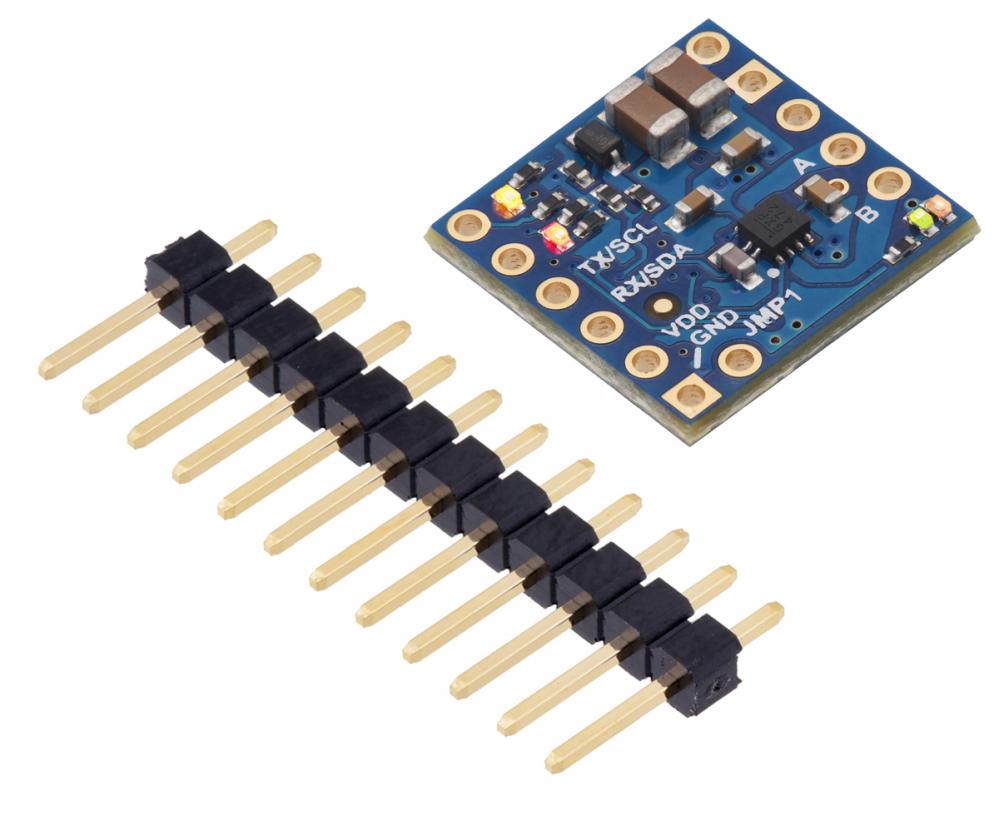
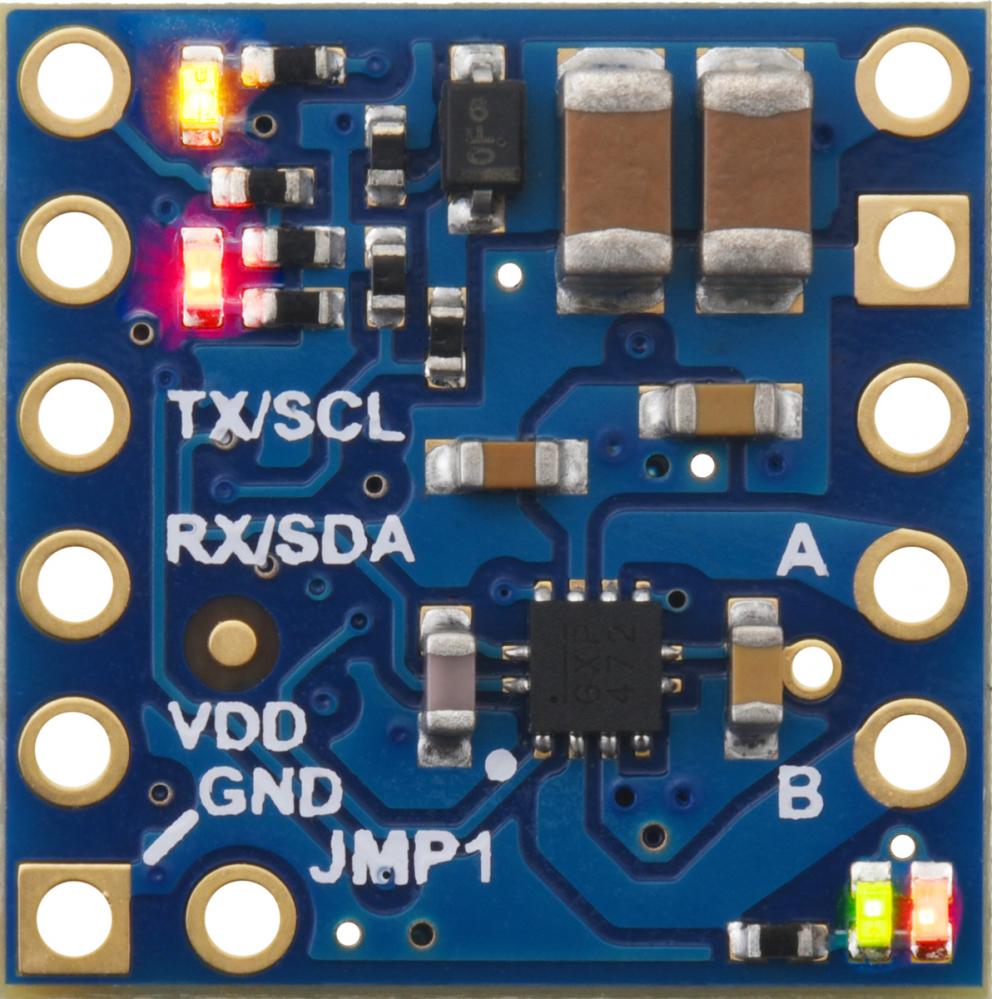
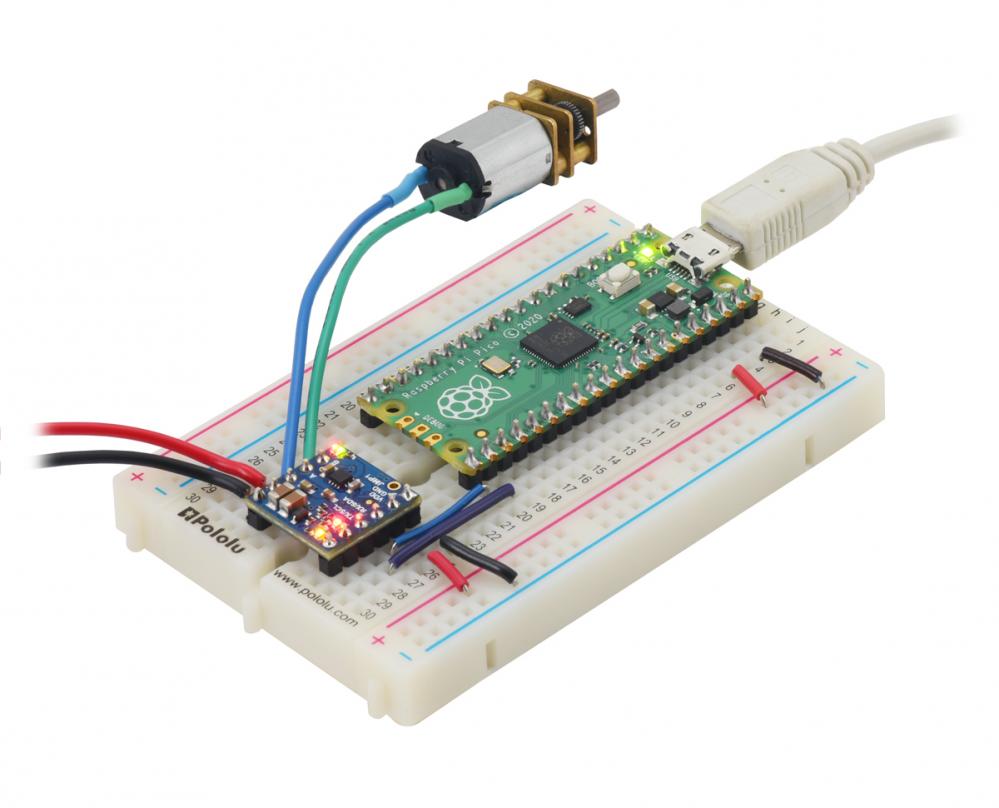
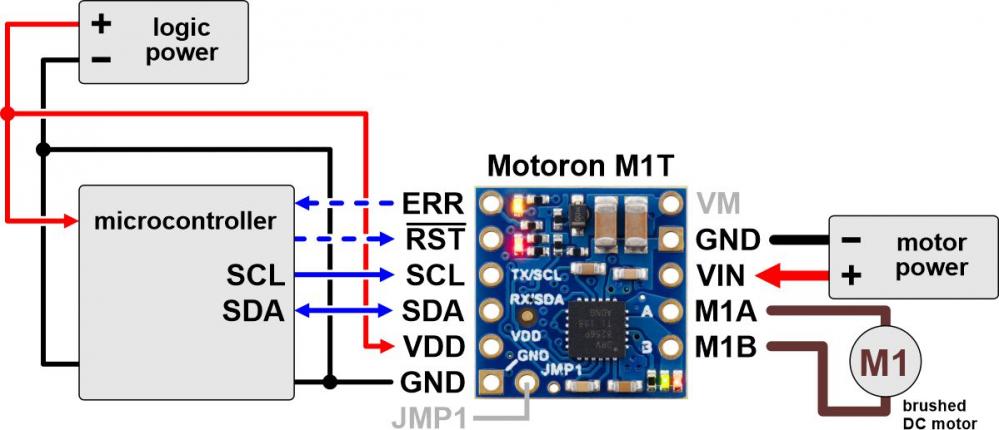
The Motoron M1T550 controller make it easy to control a single bidirectional, brushed DC motor using an I²C interface. These compact (0.6" × 0.6") boards support motor supply voltages from 1.8 V to 22 V and can deliver continuous output currents up to 1.8 A. Multiple Motoron controllers can be configured to work on a single I²C bus, allowing independent control of many motors. Unlike most of our motor drivers, the Motoron does not require any PWM outputs or timers on your microcontroller. Instead, only a single I²C interface is needed regardless of how many Motorons you connect.
Features and specifications:
One motor control channel allows for control of one bidirectional brushed DC motor per Motoron
Wide motor supply voltage range: 1.8 V to 22 V (absolute maximum)
Maximum output current per motor: 1.8 A continuous, 5 A peak for <1 second
Reverse-voltage protection on motor power supply (down to -20 V)
Logic voltage range: 3.0 V to 4.9 V (5V nominal not recommended)
Control interface:
M1T550: I²C (up to 400 kHz)
M1U550: non-inverted TTL serial (up to 250 kbps)
Optional cyclic redundancy checking (CRC)
Configurable motion parameters:
Max acceleration/deceleration forward/reverse
Starting speed forward/reverse
Direction change delay forward/reverse
PWM frequency: eight options available from 1 kHz to 80 kHz
Command timeout feature stops the motor if the Motoron stops receiving commands
Configurable automatic error response
Motor power supply (VIN) voltage measurement
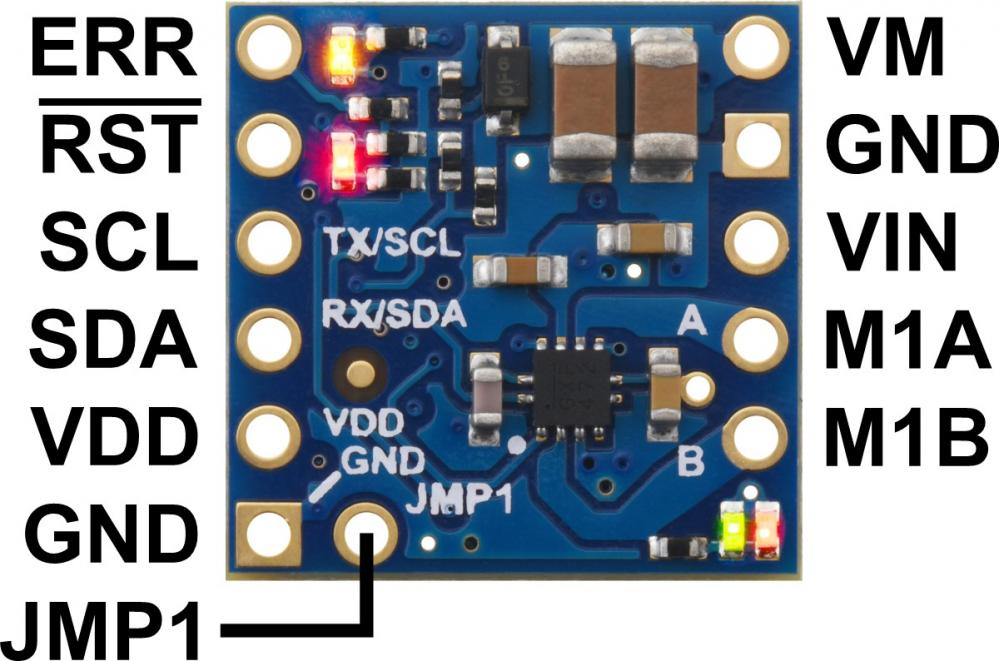
Two status LEDs
Motor direction indicator LEDs
Error output for easier detection of error conditions
Motoron Arduino library simplifies using the Motoron with an Arduino or compatible controller
Motoron Python library simplifies using the Motoron with Python or MicroPython
Comprehensive user's guide
Compact 0.6" × 0.6" size
Features and specifications:
One motor control channel allows for control of one bidirectional brushed DC motor per Motoron
Wide motor supply voltage range: 1.8 V to 22 V (absolute maximum)
Maximum output current per motor: 1.8 A continuous, 5 A peak for <1 second
Reverse-voltage protection on motor power supply (down to -20 V)
Logic voltage range: 3.0 V to 4.9 V (5V nominal not recommended)
Control interface:
M1T550: I²C (up to 400 kHz)
M1U550: non-inverted TTL serial (up to 250 kbps)
Optional cyclic redundancy checking (CRC)
Configurable motion parameters:
Max acceleration/deceleration forward/reverse
Starting speed forward/reverse
Direction change delay forward/reverse
PWM frequency: eight options available from 1 kHz to 80 kHz
Command timeout feature stops the motor if the Motoron stops receiving commands
Configurable automatic error response
Motor power supply (VIN) voltage measurement
Two status LEDs
Motor direction indicator LEDs
Error output for easier detection of error conditions
Motoron Arduino library simplifies using the Motoron with an Arduino or compatible controller
Motoron Python library simplifies using the Motoron with Python or MicroPython
Comprehensive user's guide
Compact 0.6" × 0.6" size