





Product description
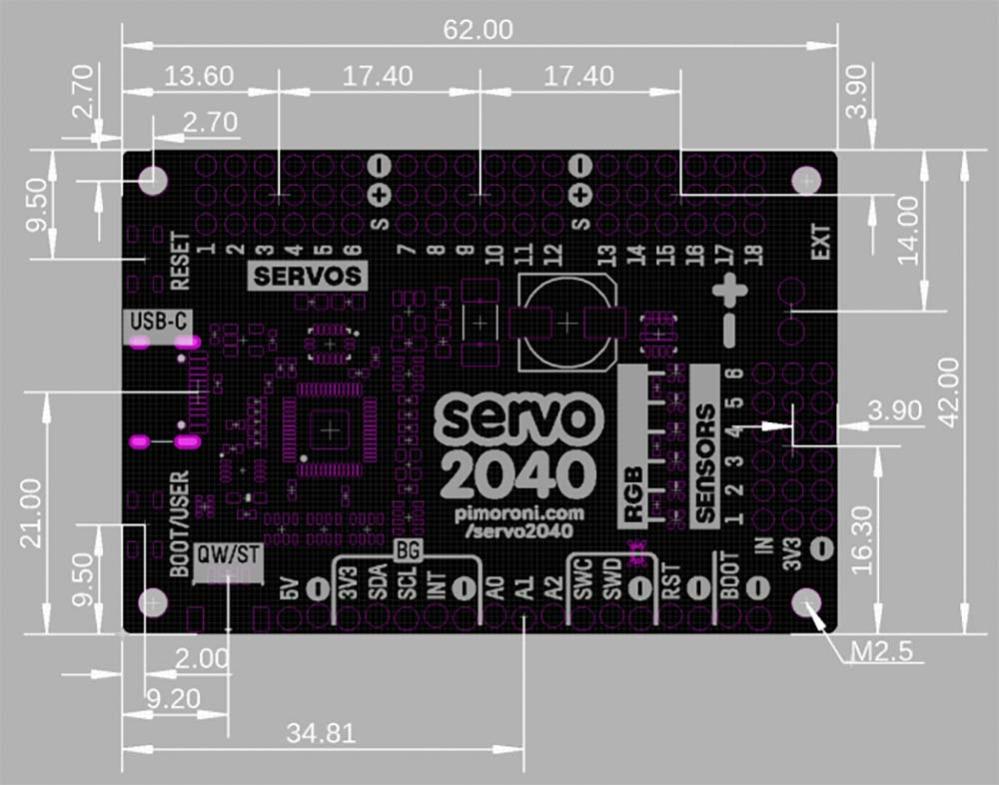
Servo 2040 is a standalone servo controller for making things with lots of moving parts. It has pre-soldered pin headers for plugging in up to 18 servos - enough for the leggiest of hexapod walkers or plenty of degrees of freedom for your robotic arms, legs or tentacles. Servos can be pretty power hungry, especially the chunky ones, so we've added some neat current monitoring functions so you can keep an eye on power consumption.
There's six addressable RGB LEDs (AKA Neopixels) for visual feedback and status reports, plus pin headers to connect up to six analog sensors - useful for sensing where the ground is, if you're about to crash into a wall, or how much pressure The Claw is exerting on your hapless test subject. We've also popped a QW/ST connector on there, to make it super easy to add a Qwiic or STEMMA QT breakout or two.
Servo 2040 is supported by a well documented C++/MicroPython servo library with lots of examples to show you how to use the individual features (and everything together).
* Powered by RP2040 (Dual Arm Cortex M0+ running at up to 133Mhz with 264kB of SRAM)
* 2MB of QSPI flash supporting XiP
* 18 sets of header pins for connecting 3 pin hobby servos
* Supports higher voltage servos (up to 11V) *
* 6 addressable RGB LEDs/Neopixels
* 6 sets of header pins for connecting analog sensors
* Onboard voltage and current sensing
* Reset and BOOT button (the BOOT button can also be used as a user button)
* USB-C connector for programming and power (3A max)
* Screw terminals for supplying external power (with reverse polarity protection) (10A max continuous current)
* Qw/ST (Qwiic/STEMMA QT) connector for breakouts
* Fully-assembled (no soldering required)
There's six addressable RGB LEDs (AKA Neopixels) for visual feedback and status reports, plus pin headers to connect up to six analog sensors - useful for sensing where the ground is, if you're about to crash into a wall, or how much pressure The Claw is exerting on your hapless test subject. We've also popped a QW/ST connector on there, to make it super easy to add a Qwiic or STEMMA QT breakout or two.
Servo 2040 is supported by a well documented C++/MicroPython servo library with lots of examples to show you how to use the individual features (and everything together).
* Powered by RP2040 (Dual Arm Cortex M0+ running at up to 133Mhz with 264kB of SRAM)
* 2MB of QSPI flash supporting XiP
* 18 sets of header pins for connecting 3 pin hobby servos
* Supports higher voltage servos (up to 11V) *
* 6 addressable RGB LEDs/Neopixels
* 6 sets of header pins for connecting analog sensors
* Onboard voltage and current sensing
* Reset and BOOT button (the BOOT button can also be used as a user button)
* USB-C connector for programming and power (3A max)
* Screw terminals for supplying external power (with reverse polarity protection) (10A max continuous current)
* Qw/ST (Qwiic/STEMMA QT) connector for breakouts
* Fully-assembled (no soldering required)